はやぶさ2を楽しもう!
Enjoy Hayabusa2
JAXA Hayabusa2 Project : December 27, 2022. Latest
お伝えしている「小惑星「2001 CC21」を観測しよう!」キャンペーンと併せた「掩蔽観測のお勧め」ですが、JAXA「2001 CC21」チームの早水勉氏から、掩蔽観測についての諸々の質問・相談(観測技術サポート等)をお受けする Zoom 会議の案内を頂きましたので以下にお知らせ致します。
「2001 CC21」による掩蔽観測 Know-How、困りごと相談(観測技術サポート)
小惑星による星食の観測に慣れておられる方は良しとして、この度、新たにご参加いただいた方や掩蔽観測の経験が少ない方には、観測について、いろいろと不明な点や不安のある点など抱えておられることと思います。これらについて気楽に質問していただき、経験者からいろいな Know-How を伝授してもらうような、Zoom 会議の内容にしたいと考えています。会議の URL は日程が決まり次第、お知らせします。
掩蔽観測の現象については、早水勉氏の「HAL 星研」のウェブページ、
02/06:http://www.hal-astro-lab.com/asteroid/230206_2001CC21.html
02/08:http://www.hal-astro-lab.com/asteroid/230208_2001CC21.html
において、星図や観測方法など詳しく紹介されており、今回の観測に特化した観測機材と観測方法の簡易マニュアルも
http://www.hal-astro-lab.com/asteroid/(98943)2001CC21observation_manual.pdf
で公開されています。
【主催】「2001CC21掩蔽共同観測チーム」リーダー:吉田二美(産業医科大学 / 千葉工業大学惑星探査センター
【講師】渡部勇人、宮下和久、渡辺裕之(JOIN)
【日程】2023/01/26(木)~01/31(火)で日程調整
【世話人】山村秀人(JOIN、NPO花山星空ネットワーク)
Zoom 会議日程調整について
会議の日程つきましては、1/26~1/31の間で、できるだけ多くの方が参加していただけるように「調整さん」で参加の可否について調査します。01/23(月)までに下記のウェブからログインして、参加の可否についてご記入してください。
質問集約
また、Zoom 会議までに質問を集約して、Zoom 会議の中で経験者に答えていただきます。どのような些細なことでも結構ですので、質問がありましたら、質問内容と困っている状況を簡潔に箇条書きにして、01月24日(火)までに下記あて Mail でお送りください。
【件名】「2001 CC21 星食観測 N-H_Zoom 会議」質問<質問者の名前>
【宛先】h-yama81215211@mbox.biwako.ne.jp(山村秀人宛)
【質問内容】箇条書きで簡潔に書いてください。
【添付資料】写真や図なども必要であれば添付してください。(できるだけファイルサイズは小さくしてください)
以上
はや2が探査する、小惑星「2001 CC21」を観測しよう!
以下、JAXA はやぶさ2拡張ミッション ” キャンペーンページ ” から:
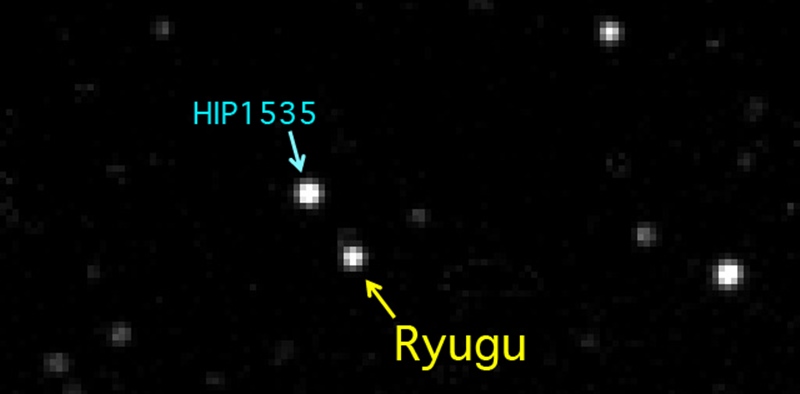
「はやぶさ2」が2020年12月に地球にカプセルを届けてから、すでに2年が経ちました。想定されていた年数は過ぎていますが、はやぶさ2探査機は順調に飛行を続けています。 次の大きなイベントは、2026年07月の小惑星「2001 CC21」のフライバイ探査です。「2001 CC21」は、いったいどのような小惑星なのでしょうか。 2023年初め、この「2001 CC21」の観測好機となります。
ということで、「2001 CC21」の観測キャンペーンを行うこととなりました。図 1 に、2023年03月末までの「2001 CC21」の位置を示します。「2001 CC21」の明るさですが、2023年初めでは約18等、そして2月の初めくらいには 16 等くらいまで明るくなりますが、3月末には20等くらいまで暗くなってしまいます。かなり暗いですから、ある程度以上の口径の望遠鏡があり慣れた方でないと観測は難しいと思います。 そのような方は観測の仕方はご存じでしょうから、ここでは観測の方法については割愛します。
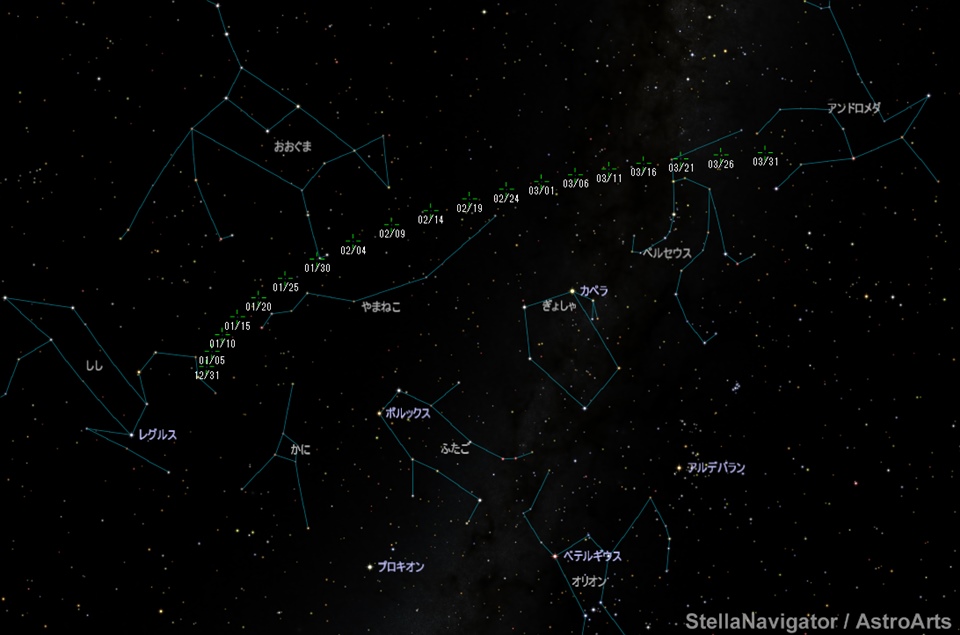
図 1. 「2001 CC21」の位置。ステラ?ナビゲータ11で作図。
「2001 CC21」の撮影に成功しましたら、画像を日本公開天文台協会にお送りください。観測を成功された方には、はやぶさ2拡張ミッションからささやかな記念品をお送りいたします。 このキャンペーンは、2022年12月27日から2023年03月末までを目処に行いますが、2023年04月以降でも観測が成功したら画像を送って下さい。
※小惑星「2001 CC21」の観測キャンペーンは、日本公開天文台協会、日本惑星協会、そして JAXA はやぶさ2拡張ミッションの共同で行っています。
画像の送付方法など詳しくは日本公開天文台協会の Web
https://www.koukaitenmondai.jp
に掲載されます。 観測キャンペーンは12月27日から開始しますが、画像の受付は準備が整い次第となります。
掩蔽観測に挑戦しよう!
さらに上級者向けの観測もあります。それは、掩蔽観測というものです。小惑星が恒星の前を通過すると、その恒星を隠すことになります。そのときに、その恒星の明るさが暗くなるわけですが、その暗くなった時刻を正確に計測する観測が掩蔽観測です。 これは、恒星の光によってできる小惑星の影が地上を通過する時刻を測定することになりますが、複数の異なる場所で観測が成功すれば、小惑星の影の形が分かり、小惑星の大きさや形を推定する情報にもなるわけです。
「2001 CC21」による掩蔽観測については、早水勉氏(HAL 星研)の Web
http://hal-astro-lab.com/asteroid/2303_2001CC21_index.htm
に詳しい情報が掲載されています。掩蔽が観測できる場所(図2参照)や日時、観測の仕方、観測結果の報告についても説明されていますのでご参照ください。 なお、掩蔽観測については、吉田二美氏(産業医科大学/千葉工業大学惑星探査研究センター)がリーダーの「プロ・アマ共同掩蔽観測チーム」にご協力をお願いしています。 掩蔽観測についての問合せや観測結果の報告は、2001cc21_occult@googlegroups.com までお願いします。また、この掩蔽観測につきましては、「星ナビ2023年02月号」(アストロアーツ)および「月刊天文ガイド2023年02月号」(誠文堂新光社)に記事が掲載されています。
図 2. 小惑星「2001 CC21」による恒星食帯。恒星食帯の幅はわずか 600 ~ 700 m しかなく、このマップでは線の太さほどしかない。緑線は誤差(1σ)で、この範囲内で 68.2 % の確率で星食が起こる。(Credit: 早水勉)
「2001 CC21」が恒星を隠す時間は 0.1 秒程度とまばたきと同じくらいの時間、恒星の明るさが暗くなるだけですので、観測は非常に難しく、適切な観測装置セット(CMOS カメラや GPS 受信機など)が必要です。詳しくは 2001cc21_occult@googlegroups.com まで問い合わせください。また、その現象が本当に見られる地域は幅 600 m から 700 m 程度の非常に狭いベルト状の範囲(恒星食帯)ですが、そのベルトの位置の誤差は実際に現象が見られる幅の 10 倍以上あります。01月から03月にかけて観測を継続し、恒星食帯の正しい位置を追い込んでいく必要があります。ですから、観測成功のためには、多数の観測者が必要になります。 是非、多くの皆さんが観測に挑戦してくだされば幸いです。掩蔽観測に参加していただいた方にも、はやぶさ2拡張ミッションからささやかな記念品をお送りいたします。
はやぶさ2拡張ミッションチーム
2022.12.27
以上、JAXA はやぶさ2拡張ミッション ” キャンペーンページ ” から
小惑星リュウグウサンプルレプリカの展示施設を募集します ~全国一斉展示企画~
小惑星探査機「はやぶさ2」のミッションで小惑星リュウグウから地球へと持ち帰ったサンプルについては、昨年、一部の施設にて期間限定で実物の一部を公開展示しましたが、実際にご覧になった方はまだまだ少数というのが実情です。
今後も実物をご覧いただける機会を増やしていきますが、一方でさらにより多くの方にサンプルを身近に感じていただけるよう、このたび、JAXA宇宙科学研究所はやぶさ2プロジェクトでは、展示施設で活用いただけるサンプルの「レプリカ」を製作しました。

粒子ひとつの形状を 3D プリンタで再現したもので、大きさ約 1 cm の実寸大レプリカと、見やすいよう10倍に拡大した形状のレプリカをセットにして、展示をしていただける国内の施設や団体のご希望を募って配布することにいたしました(申込多数の場合は抽選)。レプリカですので実物ではありませんが、立体物に接していただくことでリュウグウサンプルの実感がわきやすいと思います。科学への関心を広げる一助となれば幸いです。
Image Credit: JAXA はやぶさ2プロジェクト
レプリカ配布にあたっては、宇宙科学研究所の地元の相模原市並びに地元民間団体である「JAXA宇宙科学研究所と夢を創る会」にご協力をいただいております。
申込条件・方法など、詳しくは配布窓口となる以下の相模原市の募集要項をご参照下さい。申込期限は4月28日必着です。よろしくお願いいたします。
小惑星リュウグウサンプルレプリカの展示施設を募集します ~全国一斉展示企画~
リエントリーカプセルがウーメラ砂漠上空を舞う!
2020年12月06日午前02時32分(JST)、方向探索係がカプセルからのビーコン電波を受信し、確実に着地に近づいていることが確認できました。はやぶさ初号機を思い出しましたね。
午前03時前に着地したと思われるカプセルは、その後、04時47分(JST)、ヘリコプター探索によって着地予定区域内において発見されました。これで動的なミッション項目は総て達成となりました。
同日07時32分(JST)、着地点でのカプセルの回収作業を完了し。現地本部への輸送を開始したのが以下の写真です。画像クレジット:JAXA
★ 全員が「はや2マスク」を着用しているのが印象的な写真でした。。。

同日12月06日午前08時03分(JST)に、カプセルを搭載したヘリコプターが地元の本部に到着し、カプセルが建物内に運ばれました。
現在(12月20日)のカプセルは、すでに日本に到着し、キュレーション施設で初期分析を待つところです。開封後、リュウグウからの採取サンプル量が 5.4 g であることも判明しています。
以下で、観測キャンペーンを行いました!
はやぶさ2 おかえり!2020 共同観測キャンペーン
はや2ホットライン「運用チームからの贈り物」

「はや2マスク」を提供します!
★ イベント第四弾 October 26, 2020
JAXA では、新型コロナウイルス対策とも併せて、ウーメラ砂漠に届くリエントリーカプセル運用を記念&祈念して「はや2マスク」を製作しました。
このマスクを広く一般市民の方々にもこの「はや2マスク」でコロナ事態を乗り切って頂こうではないか、との声が関係者内で上がり、ユニフォーム同様に惑星協会がその「配布作業」を担うことになりました。
はや2マスク提供案内
スゴはや2プロジェクト
「はやぶさ2」だよ、全員ジャンプ!
スゴはや2プロジェクト
リュウグウのカケラが入ったカプセルを分離した後、はやぶさ2は、地球に・・・は戻らない。
次の目的地、小惑星 1998 KY26 へ向けて、再び旅に出かけたい!地球の引力を振り切って、地球圏を離脱して、新しい長い軌道に乗り換えなければ!それができるのは、TCM-5 の瞬間だけ!この瞬間に力強く、地球をキック!
期間 : 2020年12月05日、午後03時30分から06時頃の間
はやぶさ2トークライブ August 25, 2019 番外編

平成30年04月まで定期開催をしていた『はやぶさ2トークライブ』を約1年5か月ぶりに開催します。
話者として、ミッションマネージャの吉川真さんやイオンエンジン担当の細田聡史さんをはじめとする、はやぶさ2プロジェクトのメンバーをお招きし、これまでの小惑星リュウグウの探査で分かってきたこと、今後の展望など最新情報をお届けします。
詳細ページ
はや2ホットライン「運用チームからの贈り物」

はや2ユニフォームを提供します!
★ イベント第二弾 March 11, 2019
プロジェクトが独自で製作したオリジナルのイラストがプリントされたユニフォーム(春夏秋物:ネービー、シックブラック、シルバー、キャメルの四色)を、はや2ファンの皆さまに提供致します!
ユニフォーム提供案内
お届けがかり:日本惑星協会、JAXA はやぶさ2プロジェクト
受取人:はやぶさ2を愛する皆さま
はや2ホットライン「運用チームへの宅配便」

2nd タッチダウンミッションへの期待&成功祈願メッセージ募集
★ イベント第三弾 June 14, 2019
TD2 実施への期待や、、この応援メッセージシリーズの定番であるミッションへのメッセージも併せて募集します。
メッセージを届けよう!
お届けがかり:日本惑星協会、毎日新聞、大正製薬
受取人:JAXA はやぶさ2プロジェクト
終了しました。
リュウグウ到着後のニュース・トピックス&ギャラリー
2019 :
December 02, 2019 - イオンエンジンシステムの試運転完了、地球帰還への巡航開始予定日時決まる
November 14, 2019 - 「なぜなに はや2」を開催します
November 13, 2019 - 〝さよならリュウグウ〟キャンペーンのお知らせ
November 13, 2019 - さよならリュウグウ:リュウグウ出発航法画像のリアルタイム配信
October 02, 2019 - MINERVA-II2(ローバ2)分離運用航法画像のリアルタイム配信
October 01, 2019 - MINERVA-II2(ローバ2)分離運用
September 16, 2019 - ターゲットマーカ分離運用
September 16, 2019 - ターゲットマーカ分離運用 (TM-ORB)航法画像のリアルタイム配信
September 13, 2019 - 第1回ONC SV差込観測各賞が授与される
September 03, 2019 - ターゲットマーカ分離運用の延期について
August 22, 2019 - 「はやぶさ2」の再突入カプセル回収計画について
August 07, 2019 - 「はやぶさ2」トークライブ シーズン 2 のお知らせ
July 26, 2019 - 第2回タッチダウンの画像公開
July 11, 2019 - 第2回タッチダウン画像速報
July 10, 2019 - Brian May さんからのリュウグウ立体視画像
July 10, 2019 - Brian May さんからビデオメッセージが届きました!
July 10, 2019 - 第2回タッチダウン運用(PPTD)航法画像のリアルタイム配信
July 10, 2019 - 第2回タッチダウン運用
July 08, 2019 - 第2回タッチダウンへのアプローチ - その 3:行うべきか、行わざるべきか -
July 08, 2019 - 第2回タッチダウンへのアプローチ - その 2:タッチダウン地点の詳細 -
June 19, 2019 - 第2回タッチダウンへのアプローチ - その 1:タッチダウン地点付近の観測 -
June 12, 2019 - PPTD-TM1B運用 航法画像のリアルタイム配信
June 12, 2019 - 低高度降下観測運用(PPTD-TM1B)について
May 29, 2019 - PPTD-TM1A運用 航法画像のリアルタイム配信
May 27, 2019 - 「タッチダウンのためのターゲットマーカ投下運用」(PPTD-TM1A)について
May 15, 2019 - PPTD-TM1運用 航法画像のリアルタイム配信
May 15, 2019 - 「タッチダウンのためのターゲットマーカ投下運用」(PPTD-TM1)について
May 14, 2019 - はやぶさ2プロジェクトが二つの賞を受賞しました
May 13, 2019 - リュウグウの西半球の形状は過去の高速回転で作られた!
April 24, 2019 - 「クレーター探索運用(事後)」(CRA2)航法画像のリアルタイム配信
April 24, 2019 - 「クレーター探索運用(事後)」(CRA2)について
April 19, 2019 - こちはや漫画版 : Vol. 9: 第一回タッチダウン
April 19, 2019 - サイエンス誌に論文が掲載されました
April 04, 2019 - SCI(衝突装置)運用 航法画像
April 03, 2019 - SCI(衝突装置)運用スケジュール
April 03, 2019 - SCI運用へ応援メッセージをいただきました
March 28, 2019 - 「はやぶさ2」のイラスト改訂
March 16, 2019 - 「クレーター探索運用(事前)」(CRA1)について
March 15, 2019 - 「はやぶさ2」の状況(2019.3.4の週)
March 07, 2019 - DO-S01運用 航法画像のリアルタイム配信
March 07, 2019 - 降下観測運用(DO-S01)について
February 25, 2019 - タッチダウン直後の画像
February 21, 2019 - TD1-L08E1運用スケジュール
February 21, 2019 - TD1-L08E1運用 航法画像のリアルタイム配信
February 20, 2019 - タッチダウン地点
February 20, 2019 - 2019年1月のB0X-B運用での撮影画像
February 20, 2019 - 温かい応援、ありがとうございます
February 14, 2019 - リュウグウに弾丸を撃ち込め!
February 01, 2019 - MINERVA-II1の着地点名の訂正について
January 21, 2019 - リュウグウ表面の地名が決定!
January 16, 2019 - こちはや漫画版 : Vol. 8 - TD1-R3 ターゲットマーカ投下
2018 :
December 28, 2018 - 吉川ミッションマネージャが2018年の Nature's 10 に選出
December 27, 2018 - 小惑星リュウグウ〟想像コンテスト入選作品発表
December 25, 2018 - 合運用の探査機軌道
December 13, 2018 - MINERVA-II-1 ローバの命名について
December 13, 2018 - こちはや漫画版 : Vol. 7 - ミネルバII1着陸成功!!
December 10, 2018 - OSIRIS-REx チームにビデオレターを送りました
October 30, 2018 - 小型モニタカメラが〝クール!〟な画像を撮影
October 26, 2018 - リュウグウ接近時の連続画像
October 25, 2018 - DPS にて「はやぶさ2」の特別セッションと記者会見を開催
October 24, 2018 - TD1-R3 運用 航法画像のリアルタイム配信
October 24, 2018 - TD1-R3 運用スケジュール
October 23, 2018 - こちはや漫画版 : Vol. 6 - タッチダウン 1, リハーサル 1 (TD1-R1)
October 14, 2018 - TD1-R1-A 運用, 航法画像
October 14, 2018 - TD1-R1-A 運用スケジュール
October 14, 2018 - タッチダウン運用のスケジュール変更について
October 12, 2018 - 小型着陸機 MASCOT のプレスリリースについて
October 05, 2018 - 探査機から分離していくMASCOTの撮影に成功!
October 03, 2018 - MASCOT の情報について
October 02, 2018 - 小型着陸機 MASCOT
October 02, 2018 - MASCOT 分離運用, 航法画像
October 02, 2018 - MASCOT 分離運用スケジュール
September 27, 2018 - これまでで最高解像度のリュウグウ地表画像
September 27, 2018 - MINERVA-II-1 が撮影した画像、第2弾!
September 27, 2018 - リハーサル運用によるタッチダウン候補地点の確認
September 27, 2018 - BOX-B 運用で撮影されたリュウグウの画像
September 22, 2018 - MINERVA-II-1、写真撮影・リュウグウ着地・ホップによる移動に成功!
September 20, 2018 - MINERVA-II-1 分離運用, 航法画像のリアルタイム配信
September 20, 2018 - MINERVA-II-1 分離運用スケジュール
September 19, 2018 - 小型探査ローバ MINERVA-II-1
September 15, 2018 - 探査機の影と衝効果
September 12, 2018 - タッチダウン 1 リハーサル 1(TD1-R1)の結果について
September 11, 2018 - タッチダウン 1 リハーサル 1 航法画像のリアルタイム配信
September 11, 2018 - タッチダウン 1 リハーサル 1(TD1-R1)のスケジュール
September 05, 2018 - 小型モニタカメラで撮影したサンプラホーン
August 31, 2018 - レーザ高度計一か月の成果
August 31, 2018 - TIR によるリュウグウのサーモグラフィ
August 31, 2018 - 小惑星リュウグウの表面に多くある岩塊
August 31, 2018 - Box-C運用で撮影したリュウグウの画像
August 30, 2018 - こちはや漫画版 : Vol. 5 - 重力計測!!
August 29, 2018 - 運用状況 : 「はやぶさ2」の状況(2018.8.20の週)
August 29, 2018 - 着地候補地点の決定!
August 16, 2018 - なぜなに「はやぶさ2」何でも質問教室
August 07, 2018 - 高度1kmから撮影したリュウグウ
August 06, 2018 - 重力計測運用 航法画像のリアルタイム配信(終了)
August 06, 2018 - 中高度運用 航法画像の公開画像一覧
August 06, 2018 - OPNAV な人々
July 31, 2018 - リュウグウの高解像度立体視画像
July 25, 2018 - 高度約6kmから撮影したリュウグウ
July 11, 2018 - リュウグウの形状モデル初期バージョンが完成
July 11, 2018 - ホームポジションから見たリュウグウ
July 10, 2018 - これがリュウグウ - 3Dで見る全体像
July 04, 2018 - ブライアン・メイさんによる小惑星リュウグウのステレオ視画像
June 29, 2018 - リュウグウ到着!
運用状況 - プロジェクトウェブ
最新のリュウグウ画像
タッチダウン1リハーサル3(TD1-R3)において小型モニタカメラ(CAM-H)で撮影された画像。2018年10月25日、11:47(日本時間)に上昇を開始した直後(高度約21m)から1秒毎に撮影したもの。上昇速度は約52cm/s。
画像をクリックするとアニメーション画像が表示されます。ファイルサイズは 2.2 MB です。
Image credit : JAXA
はやぶさ2探査機によるリュウグウ初撮像
2018年2月26日に小惑星探査機「はやぶさ2」搭載の ONC-T(望遠の光学航法カメラ)によって、目的地である小惑星リュウグウ(Ryugu)の撮影に成功しました。撮影は、日本時間で正午から翌27日の午前9時まで行われ、300枚ほどの撮影がなされました。2月27日のうちに9枚のデータが探査機から伝送され、リュウグウが予定通りに撮影されていることが確認されました。
リュウグウの明るさは 9 等程度で、プロジェクトウェブ掲載の画像を見て分かるように周囲の恒星との相対位置が変化している様子も確認できています。撮影が行われたときのリュウグウ-探査機間の距離は約130万kmでした。「はやぶさ2」から見たリュウグウはうお座の方向に見えています。
Caption : 2018年2月26日12時頃から15時頃(日本時間)にかけて撮影された9枚の写真を連続的に示したもの。中央付近で左から右にわずかに動いている天体がリュウグウ。個別の画像に一瞬だけ見える像はノイズである。写真の画角は0.8度。(画像提供:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
「はやぶさ2」どんなことでも質問 ” 箱 ”
はやぶさ2探査機が小惑星リュウグウに間もなく到達します。ONC-T(光学航法カメラ)によるリュウグウ撮像から始まり、今後、たくさんの「リュウグウ」の姿が公開されます。
これら、はやぶさ2探査機が取得した情報・データについて、さらには「そもそも」の、はやぶさ2プロジェクト全般に関する質問を受け付けます。詳細、投稿は以下のページを御読みください。
皆さんから届いた質問とその回答 - January 04, 2019 最新

はやぶさ2関連資料
「はやぶさ2」の軌道データ、ファクトシート、hayabusa2 Press Kit 等、他に軌道予想図などを収録しています ...

はやぶさ2地球スイングバイ観測
日本惑星協会(TPSJ)では、日本公開天文台協会(JAPOS)との共催(協力:JAXAはやぶさ2プロジェクト)で、JAPOS による観測施設向け「はやぶさ2地球スイングバイ観測のデータ支援企画」、広く一般の観測者皆さんにも提供する「はやぶさ2スイングバイ軌道データ支援」を連動企画しました ...
催事・講演会等
これまでに行われたトークライブや記者発表、今後の催事などを掲載しています ...
何故、リュウグウを目指すのか ...
小惑星の形状を調べる
火の鳥「はやぶさ」未来編 その12
現在,はやぶさ2プロジェクトで実施されている着陸地点選定運用訓練を通じて,作業手順のバグ出しや,得られる形状モデルの精度評価などを進めている ... 平田成 他
小惑星の内部構造を探る
火の鳥「はやぶさ」未来編 その11
小惑星の「内部構造」といっても,月や火星のような重力天体内部と同様に分化が生じているとは考えられない.期待されるのは,衝突・合体の痕跡として残されているかもしれない不均一性と,表層のレゴリス,ボルダーの水平,垂直移動による物質進化である ... 並木則行 他
地球からの小惑星物質回収
火の鳥「はやぶさ」未来編 その10
探査機による小惑星からのサンプルリターンと並行して,南極大陸からの小惑星や彗星由来の物質の回収も続けられている.本稿では南極において,どのように隕石や宇宙塵が回収されているかについて簡潔に紹介する ... 中村智樹 他
はやぶさ2による小惑星レゴリス試料採取を模擬した衝突実験
「遊星人」 Vol. 24, No.3, 2015 掲載
はやぶさ2のサンプリング候補地点として,粉体層からなるレゴリスが有力視されている.そこで本稿では,はやぶさ2のサンプリング機構を模擬し,小惑星レゴリスからのサンプル採取時の放出粒子の挙動や採取量を実験的に明らかにした ... 岡本千里 他
TIR で観る小惑星表面のちょっと下
火の鳥「はやぶさ」未来編 その09
TIR(中間赤外カメラ)は,8 から 12 ミクロンの波長帯で熱輻射の 2 次元イメージングを行う.ターゲット天体の 1 自転分の撮像から表層物質の熱履歴をもとめ,そこから熱物性を推定する.表層物質の熱物性は,ミッション遂行に必要な情報であるばかりでなく,その後の天体の運命を決める重要な情報である ... 千秋博紀 他
ONC 地形観測から探る小惑星の力学進化
火の鳥「はやぶさ」未来編 その08
はやぶさ2に搭載された光学航法カメラ(ONC:Optical Navigation Camera)はその名の通り探査機のナビゲーションの役目を担うカメラであるが,科学観測においても中心的な役割を果たす.本稿では特に小惑星の力学進化過程の復元に向けた,ONC 地形観測の戦略について紹介する ... 諸田智克 他
NIRS3 と C 型小惑星の水
火の鳥「はやぶさ」未来編 その07
内部氷の存在を検証するには水質変成が起きたときの水の挙動を理解することが必要であり,NIRS3 では衝突装置が作り出す人工クレーターの観測から加熱脱水や宇宙風化による二次的な変成の影響を識別し,母天体上で起きた水質変成の情報を抽出することをめざす ... 北里宏平 他
工学技術としてのはやぶさ2
火の鳥「はやぶさ」未来編 その06
小天体探査を工学面で持続的に発展させるには,技術の継承と革新の両面をにらみながら,ミッションを組み立てていくことが重要である.はやぶさ,はやぶさ 2,そしてその次へ.我が国の小天体探査は続く ... 津田雄一
はやぶさ2統合サイエンスの理念
火の鳥「はやぶさ」未来編 その05
本稿では「はやぶさ 2」を通じて行なわれている統合サイエンス活動を紹介する.100 億円規模のサイエンスミッションの義を尽くす活動として「統合サイエンス」の意義がある ... 小林直樹
C 型小惑星をもちかえる
火の鳥「はやぶさ」未来編 その04
対象小惑星(1999 JU3)そのものの形成と現在までの進化を理解するだけでなく,太陽系の誕生から最初期の物質進化,そして,地球の海や生命の材料となる揮発性元素の最終進化の場としての小惑星の役割を明らかにする ... 橘省吾
SCI / DCAM3 と衝突の科学
火の鳥「はやぶさ」未来編 その03
SCI とは Small Carry-on Impator の略で,日本語では小型搭載型衝突装置と呼んでいる機器である.はやぶさ 2 では,はやぶさ初号機と比較して幾つかの新しい試みがなされているが,この SCI はその中でも最もチャレンジングな試みである ... 荒川政彦 他
宇宙工学・宇宙探査としての意義
火の鳥「はやぶさ」未来編 その02
「宇宙を自在に往来する独自能力の維持発展」と「人類の活動領域の宇宙への拡大」という宇宙工学・宇宙探査に跨る目標を担い,「はやぶさ2」小惑星探査ミッションが開発中である ... 國中均
はやぶさ2:経緯と計画概要
「遊星人」 Vol. 19, No.1, 2010 掲載
「はやぶさ」に続く小惑星探査計画「はやぶさ2」が最初に提案されてからの約 4 年間の経緯と,計画の概要をまとめた.その中で,ミッションの目標と,それに基づき選定された搭載機器の仕様についても簡単に述べる ... 高木靖彦 他